Важіль
| Важіль, один з шести простих механізмів | |
|---|---|
 Важелі можуть використовуватися для прикладення великої сили при незначній відстані на одному кінці, із застосуванням всього лиш невеликої сили при значній відстані на іншому. | |
| Класифікація | Простий механізм |
| Галузь | Будівельна справа |
| Вага | Маса визначає значення гравітаційного прискорення |
| Джерело енергії | Потенціальна та кінетична енергія |
| Компоненти | Точка опори, тягар та прикладене зусилля |
Принцип дії важеля

Важіль першого типу

Важіль другого типу
Важіль третього типу
Ва́жіль, підо́йма[1] — простий механізм, тверде тіло, що може обертатися навколо певної точки, яка називається точкою опори. В основному застосовується для підйому вантажів, однак існують також інші способи його застосування. Зокрема, система важелів використовується для врівноваження ваги тіла у важільних вагах.
Одним з перших трактатів, у якому докладно розглядалася проблема важеля, був трактат «Механічні проблеми» невідомого автора з арістотелівського корпусу. Важіль використовувався людством з древніх часів, а от повністю зрозумів і зумів сформулювати принцип дії цього простого механізму Архімед. Саме йому належить крилатий вираз «Дайте мені точку опори, і я переверну Землю».[2]
Зміст
1 Принцип дії
2 Типи важелів
3 Виграш у швидкості
4 Див. також
5 Примітки
Принцип дії |
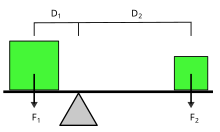
Принцип дії важеля базується на основних законах статики. Статична рівновага досягається тоді, коли алгебраїчна сума добутків сили на плече важеля дорівнює нулю.
- ∑iFiDi=0,displaystyle sum _iF_iD_i=0,,

де Fidisplaystyle F_i — прикладена сила, Didisplaystyle D_i — відповідне плече. Сили потрібно брати зі знаком плюс, якщо вони намагаються повернути важіль в один бік (наприклад, за годинниковою стрілкою), і зі знаком мінус, якщо вони намагаються повернути його в протилежний бік.


Із врахуванням знаків умова рівноваги для важеля на діаграмі праворуч запишеться у вигляді.
F1D1=F2D2displaystyle F_1D_1=F_2D_2.

Для того, щоб отримати виграш у силі, тобто піднімати більший вантаж, застосовуючи меншу силу, необхідно прикладати її до довшого плеча.[3]
Типи важелів |
За будовою можна виділити важелі трьох типів.[4]
- У важелі першого типу точки прикладення сил лежать з різних боків від точки опори. Одна з сил намагається повернути важель за годинниковою стрілкою, інша — проти годинникової стрілки. Для того, щоб отримати виграш у силі, потрібно, щоб плече, до якого прикладена сила, було довшим за плече навантаження.
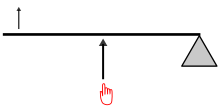
- У важелі другого типу обидві точки прикладення сил лежать по один бік від точки опори і тягар має менше плече. Щоб підняти тягар, необхідно направити силу вгору. Приклади таких важелів — тачка, лом.
- У важелі третього типу обидві точки прикладення сил лежать по один бік від точки опори, але тягар має більше плече. При цьому потрібно прикладати силу, більшу за тягар. Приклад такого важеля — ложка.
Іноді важелі використовуються не для того, щоб отримати виграш у силі, а для того, щоб отримати виграш у відстані, на яку переміщається вантаж. Приклад такого використання — криничний журавель або будівельний кран. У цьому випадку вантаж легкий, порівняно з противагою на кінці протилежного плеча.
Виграш у швидкості |
В метальних знаряддях, наприклад, катапультах використовується виграш у швидкості. Оскільки кут повороту обох пліч важеля однаковий, то відстань, яку проходить за певний час довший кінець більша, ніж відстань, яку проходить коротший кінець. Математично це твердження можна виразити формулою
V1D1=V2D2displaystyle frac V_1D_1=frac V_2D_2.

Таким чином, прикладаючи силу до коротшого кінця й змушуючи його рухатися, можна водночас досягти дуже високої швидкості довшого кінця, що потрібно для метання снарядів.
Див. також |
- Похила площина
- Клин (механіка)
- Блок (механіка)
- Гвинт
Примітки |
↑ Підойма // Словник української мови : в 11 т. — К. : Наукова думка, 1970—1980.
↑ (англ.)Mackay, Alan Lindsay (1991). Archimedes ca 287–212 BC. A Dictionary of scientific quotations. London: Taylor and Francis. с. 11. ISBN 978-0-7503-0106-0.
↑ (англ.)Uicker, John; Pennock, Gordon; Shigley, Joseph (2010). Theory of Machines and Mechanisms (вид. 4th). Oxford University Press, USA. ISBN 978-0-19-537123-9.
↑ (англ.)Davidovits, Paul (2008). Chapter 1. Physics in Biology and Medicine, Third edition. Academic Press. с. 10. ISBN 978-0-12-369411-9.
 | Це незавершена стаття з технології. Ви можете допомогти проекту, виправивши або дописавши її. |
| |||||


